您现在的位置是:首页 > 信息 > 正文
自动驾驶汽车的人类行为建模
发布时间:2023-06-21 16:11:01编辑:慕容晨健来源:
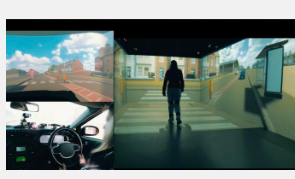
一项研究表明,人类心理学模型可以帮助自动驾驶汽车与道路上的人类司机互动。Gustav Markkula 及其同事将多个计算心理模型组合成一个主模型,以模拟试图穿过繁忙道路的行人以及该道路上的人类驾驶员。该模型的目标是捕获导致观察到的行为的潜在认知机制。贝叶斯感知、心理理论、行为博弈论、行动方案的长期评估和证据积累决策的计算模型被整合起来,以预测在实际交通中观察到的微妙行为,例如在让行的汽车前面穿过之前的犹豫以夸张的方式停车,向行人发出汽车让行的信号,或者加速汽车以阻止行人过马路的机会。由此产生的模型还准确预测了 32 对在驾驶员-行人模拟器中作为驾驶员和行人互动的参与者的过马路行为。然而,作者指出,这种穿越情况几乎没有触及现实世界驾驶的表面。准确地模拟交通中人与人之间的无数交互所需的复杂性将需要大量的进一步工作。
作者表示,机器学习可能有助于对超出机械建模当前限制的行为进行建模,并且将这两种方法结合起来特别有前途。然而,作者指出,这种穿越情况几乎没有触及现实世界驾驶的表面。准确地模拟交通中人与人之间的无数交互所需的复杂性将需要大量的进一步工作。作者表示,机器学习可能有助于对超出机械建模当前限制的行为进行建模,并且将这两种方法结合起来特别有前途。然而,作者指出,这种穿越情况几乎没有触及现实世界驾驶的表面。准确地模拟交通中人与人之间的无数交互所需的复杂性将需要大量的进一步工作。作者表示,机器学习可能有助于对超出机械建模当前限制的行为进行建模,并且将这两种方法结合起来特别有前途。
标签:
猜你喜欢
- disney(twisted及wonderland官网及东京Disneysea人手一个的Duffy)
- 郑爽感情现状(郑爽新恋情被唱衰
- 巨人里的阿尔敏是男是女 巨人最新话爱尔敏阵亡
- 牛肉炖柿子做法 做牛肉炖柿子步骤
- 怀念过去时光 怀念过去时光追忆似水流年)
- 英雄联盟卡莎有几种出装 卡莎稳健型出装
- 集可以组什么词语(集可以组词语有哪些
- 当前十首最火的韩国歌曲(韩国乐坛选出100首有史以来最佳的韩国流行音乐
- 英国怎么买护肤品 腐国女孩会买什么护肤)
- 余罪2为什么被封杀了 啥看法余罪2提前泄漏)
- 天津比较靠谱的100平装修公司(2022天津十大装修公司排名
- 最好吃又简单的南瓜饼怎么做 教你制作香甜可口的南瓜饼)
- 抗美援朝经历几场大规模战役(抗美援朝不可不知的五大战役)
- 快来参考一下我适合什么眉型 这3种眉型经典又好看
- 蓝盈莹的家世背景(蓝盈莹确认从人艺离职)
- 张根硕发福对比 张根硕今天退役了
- 凤阳花园湖美食 凤阳武店的美食
- 运营商哪个套餐最便宜 三大运营商齐发力低月租套餐
- 鼓浪屿家庭旅馆便宜 鼓浪屿hot6小清新家庭旅馆
- 袁隆平为什么不是中科院院士(袁隆平评院士为什么被卡?袁隆平为何屡次落选中科院院士)