您现在的位置是:首页 > 生活 > 正文
团队从移动的植物组织中寻找设计人工执行器的灵感
发布时间:2023-09-20 16:31:59编辑:淳于固心来源:
科学家们正在寻找能够运动的植物组织,以激发人工执行器的设计和制造。这些仿生执行器在软机器人、假肢和智能生物医学设备等应用中具有巨大的潜力。中国科学院的一个研究小组发表了一篇前瞻性论文,专门关注植物调节运动速度的方式以及如何将其应用于人工执行器。
他们的论文发表在9 月 18 日的《Nano Research》杂志上。
这些人造执行器对湿度、溶剂、热、光和电做出响应,将环境能量转化为形状变化。科学家们从植物中寻找灵感,因为植物学会了移动的方式。
经过数十亿年的进化,许多植物器官已经发展出改变其形状的策略。植物利用形状的变化来获取营养、传播种子、将种子埋在土壤中,甚至摆脱压力。“通过从大自然中汲取灵感,可以开发出具有从超快到超慢的各种运动速度的人工执行器。这为创造先进机器人和设备开辟了新的可能性。”中国科学院理化技术研究所研究员张飞龙说。
当捕蝇草的触发毛被触碰两次时,捕蝇草就会关闭叶瓣来捕捉昆虫。茅膏菜植物将叶子卷曲覆盖猎物。含羞草植物在雨天会关闭叶子以避免水滴。甚至一些死去的植物组织也会改变形状。例如松果鳞片、麦芒、种荚、冰植物种子蒴果、蒲公英种子的刚毛等都可以改变形状。
在活的植物中,形状的变化和运动与离子通道有关。然而,死亡的植物组织表现出吸湿运动,即与湿度变化相关的运动。由于其独特的结构和成分,这些死亡的植物组织为科学家提供了人工执行器的自然模型。
这些植物能够以非常精确的方式控制它们的运动。例如,松果移动非常缓慢,以保证它们只有在长期干燥的环境中才能打开,这使得风和动物可以将种子从母树上传播开来。
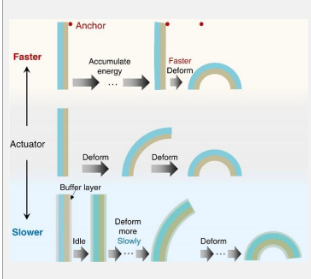
传统的研究主要集中在植物组织的运动方式上,但很少关注速度调节策略。在该团队的观点论文中,他们重点了解植物组织使用的速度调节策略,并提出仿生执行器的潜在速度调节策略。
该团队总结了设计仿生执行器的自然策略,该执行器可以模仿生物系统的令人难以置信的速度(从超快到超慢)和多功能性。他们的论文探讨了形状变化的机制,以及控制运动速度的策略。该团队还研究了从仿生人工执行器的植物原型中学习的几个模型,以及与不同速度要求相关的不同场景。他们探讨了人工执行器开发中的挑战和机遇。最后,团队讨论了执行器速度调节的潜在策略,这可能有助于其进一步发展。
标签:
猜你喜欢
- 绷的多音字是什么意思(绷的多音字是什么)
- 微笑照片大全图片(微笑照片)
- 异性相吸同性相斥原理(异性相吸)
- 王奕盛打狗棍演的谁(王奕盛)
- 南极冰盖融化的影响(若南极冰盖完全融化地球海平面将上升)
- 通达信快捷键大全图片(通达信快捷键大全)
- 尺度最大的美剧是哪一部小说(尺度最大的美剧是哪一部)
- 找不到金税盘怎么解决(找不到金税盘)
- 开皇律是谁颁布的(开皇律)
- 主导的意思是(主导的意思)
- 二流子比喻什么人(二流子)
- 记忆棉是什么材质(记忆棉是什么)
- 企业安全生产的目的是什么(企业安全生产的重要意义)
- 厦门大学嘉庚学院好不好?(厦门大学嘉庚学院好不好)
- 余姚市梦麟中学2024年高考成绩(余姚市梦麟中学)
- 最好听的十首英语歌曲(最好听的英语歌曲排行榜)
- 适合手机铃声的歌曲纯音乐(适合手机铃声的歌曲)
- 三无人员是指哪三无(三无产品是指哪三无)
- 印度人口密度有多恐怖(印度人口密度)
- 苏州高铁站和苏州北站是一个地方吗(苏州高铁站)